
Avec la taupe, nous abordons un exemple type de conception expérimentale de robot, le plus simple du monde, mais qui constitue néanmoins un système complet. Il s'agit d'un robot capable d'explorer une pièce en évitant les obstacles.
Détecter ou éviter une collision dépend beaucoup de la nature du capteur utilisé et de sa forme. Pour que le capteur fournisse une information d'un choc imminent ou de collision, il ne suffit pas de choisir un capteur, il faut aussi bien le positionner.
Le choix du détecteur de choc s'est porté sur un mini-interrupteur pare-chocs.
|
Les broches à souder
|
||||||||||
|
Connecteur
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
Carte robot
taupe
|
+ batterie
|
Capteur
|
sens gauche
|
sens droit
|
Capteur
|
masse
|
||||
|
Carte pour commander
les moteurs
|
+ batterie
|
+ mot gauche
|
- mot gauche
|
sens gauche
|
sens droit
|
- moteur droit
|
+ moteur droit
|
masse
|
||
Fonctionnement :
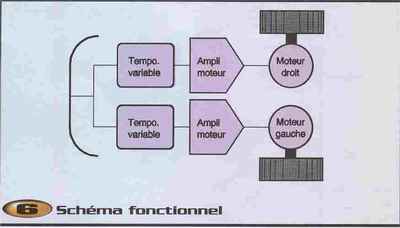
Dans son état stable ou normal, le robot roule devant lui, soit en ligne droite, soit en arc de cercle suivant les réglages des vitesses des moteurs. Lors d'une collision avec n'importe quoi, les 2 temporisateurs sont déclechés. Cela entraîne une inversion du sens de rotation de chaque moteur, le robot recule donc. La durée de cette inversion du sens de rotation des 2 moteurs est réglée sur 2 valeurs différentes, 1 et 2 secondes. Conséquence de cela, un moteru va reprendre sa rotation initiale avant l'autre. Cette différence va permettre au robot de tourner sur place vers la droite ou vers la gauche suivant le choix du temporisateur le plus long. Au final le robot reprendra son exploration devant lui, en ayant évité un obstacle sur son chemin.
Les différents schémas :
Pour tester cette carte, on commencera à placer les résistances ajustables en position médiane. Ne pas installer la carte de commande des moteurs, on touchera les pare-chocs pour déclencher les temporisateurs. On vérifiera qu'en faisant varier chacune des résistances ajustables RV1 et RV2, on observe la variation du temps pendant lequel les sorties basculent associés à chaque LED.